汽车钢板的视觉定位检测过程,重力对中和机械对中,都存在相同的问题。首先,产品的外观可能会留下污点,这会因重力和气缸拍打而影响质量;第二,生产线受重力和机械研磨的影响。第三,成本高。视觉定位可以轻松解决这些问题。首先,视觉定位是一种非接触式定位方式。它安装在传送带上方,从而避免了由于外力增加而影响质量的现象;其次,从拍照和处理图像到将坐标信息提供给机器人的时间控制在500毫秒内;第三,与传统的定位方法相比,视觉定位检测的成本更低,但更稳定,更准确。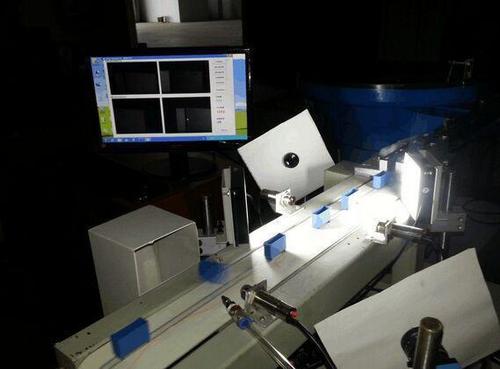
钢板视觉定位检测系统可以通过分析视觉模式匹配工具来切换到相应的作业。对于宽视角产品(3-4米)和不同类型的材料,钢制视觉系统测试过程:
(1)在传送到预定位置后,PLC将位置信号发送给机器人,然后机器人将触发照片信号发送给机器人。通过以太网的视觉系统;
(2)视觉系统接收到触发信号,然后对其进行拍照和处理,并计算出坐标信息(横坐标,纵坐标,偏转角);
(3)视觉系统将产品的坐标信息(水平偏移,垂直偏移和偏转角度)发送给机器人;
(4)根据产品的位置偏移信息,机器人调整其手势以抓住产品并将其放置到指定位置;
(5)完成此过程后,机器人将返回等待点以等待下一个信号。
模式匹配技术
每个机器视觉应用程序的第一步(也是成功的关键步骤)是在可视摄像机的视野中定位对象-此过程称为模式匹配。
有时模式匹配非常困难,因为太多的变量会影响视觉系统中对象的显示模式。传统的模式匹配技术基于像素网格分析过程,称为归一化相关。这种方法通过查找灰度级或图形基准与图片的其他部分之间的统计相似性来固定事物的X / Y位置。
这种方法在某些情况下是有效的,但是当生产线的外观频繁变化(例如物体的角度,大小和形状)时,其定位物体的能力和准确性将受到限制。
为了克服这些限制,盈泰德开发了称为Rvsto的几何图案匹配技术。通过该技术,可以通过不依赖于像素网格的边界曲线来获得对象的几何形状。然后可以在图片中搜索相似的形状,此技能不受特定灰度级的限制。因此,无论对象的角度,大小或形状如何变化,都可以准确找到它。从根本上提高了这项技术的服务能力。
Rvsto通过先进的几何图案匹配技术可可靠且正确地定位工件。即使在恶劣的条件下,Rvsto也能够较大地减少或完全消除固定的要求和成本。对于定位工件或特征,Rvsto是一种具有较大视觉检查能力和高视觉系统可靠性的工具。
 微信在线咨询
微信在线咨询