视觉检测相机(当然还有智能相机)不再需要特殊的图像采集卡来进行图像传输。这些接口卡通常不用于图像传输,而是用于图像数据的机载预处理。因此,这些经典的附加图像采集卡功能已移入这些不再需要图像采集卡的相机类型。
这样,可以在将原始图像传输到PC系统之前对其进行优化,而不会增加机器视觉系统的处理器负载。查找表可以重新映射亮度强度,光梯度校正可以使图像全局均匀化,自动白平衡可以补偿相机的色温,甚至可以通过插值从图像中去除缺陷像素。
下面说明一些重要的功能。
查找表(LUT)
借助于LUT,可以将每个单独像素的亮度信息转换为新值。为此,您可以创建并编写一个表,该表定义哪种灰色阴影(对于8位单色相机,从0到255)接收哪个目标值。
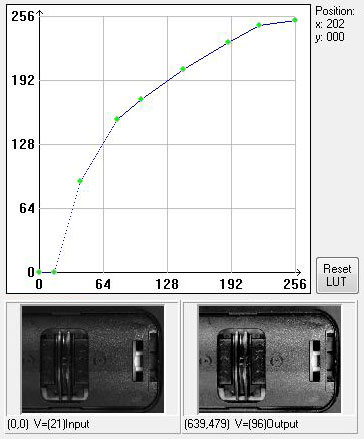
具有LUT校正的图像
图像中的深灰色调被推到更亮的水平

具有LUT校正的图像
在查找表(LUT)的帮助下反转灰色调
借助于LUT,可以将每个单独像素的亮度信息转换为新值。为此,您可以创建并编写一个表,该表定义哪种灰色阴影(对于8位单色相机,从0到255)接收哪个目标值。
阴影校正
在许多情况下,可以在相机图像中向边缘观察到连续的亮度降低。
造成这种情况的典型原因是:
1、相机光学元件的渐晕效果
2、太少或与设计有关的不均匀照明,无法均匀地照亮整个图片。
3、CCD传感器上的微透镜所产生的阴影效果比照相机的镜头卡口(C卡口/ F卡口)大。传感器边缘像素上的微透镜也会由于入射光以一定角度而导致渐晕,结果是明显的阴影。
实时图像带有轻微衰减
环形照明太小会导致强烈的光衰减。明亮的表面具有40%的亮度差。
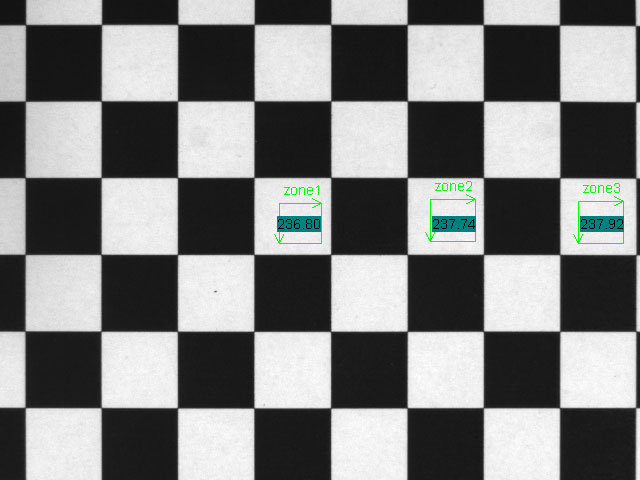
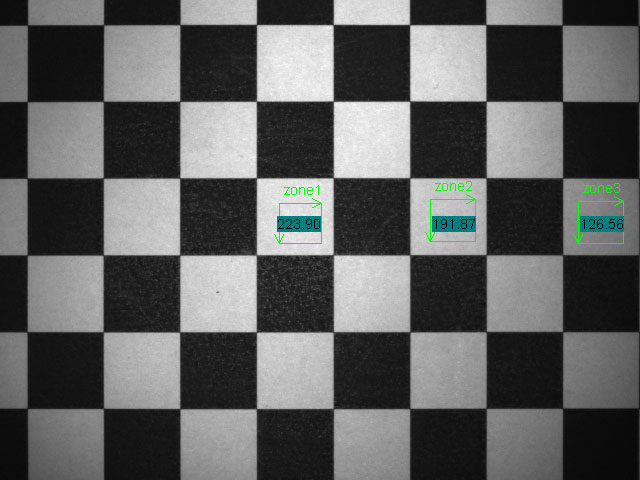
带阴影校正
阴影校正应用于图像,灰色现在看起来很均匀,3个盒子中几乎无法测量的亮度波动。
CCD传感器上的微透镜所产生的阴影效果比照相机的镜头卡口(C卡口/ F卡口)大。传感器边缘像素上的微透镜也会由于入射光以一定角度而导致渐晕。结果是明显的阴影。
像素错误校正
即使在现代CCD的情况下,尤其是在CMOS传感器的情况下,单个像素也可能有缺陷,或者与使用相同曝光的相邻像素相比显得更亮或更暗。较令人困扰的缺陷像素是由于半导体上的绝缘不足或缺陷而额外充电的像素,并且由于过多的自由电荷载流子而破坏了实际的图像信息。这些像素错误在图像中显示为非常亮的点。如果存在几种此类像素错误,则图像看起来像“星空”。对于1-CCD彩色摄像机,由于拜耳马赛克,这些亮点甚至在信号处理后甚至会显示为彩色。
可以通过对相邻像素进行插值来进行适当的校准,从而消除具有较低或高输出特性的像素。这通常是由制造商在出厂前完成的。但是,这些影响通常在传感器一定老化后或在特殊环境条件下出现。使用高质量摄像机时,用户可以随时执行平衡,以补偿这些故障像素。
RGB转换
工业彩色摄像机可以以不同的颜色格式传输其数据。然而,在单芯片彩色相机上生成的实际彩色图像实际上是带有拜耳马赛克的灰度图像。在传感器上的典型像素排列中,只有红色,绿色或蓝色的光穿过各个像素上的滤色器。这将导致光栅化的灰度图像。灰色阴影的亮度对应于相应的颜色强度。通过考虑各个相邻像素,可以为所有像素获取并计算丢失的R / G / B值。许多彩色摄像机可以通过FPGA直接转换颜色(从Bayer到RGB转换)。
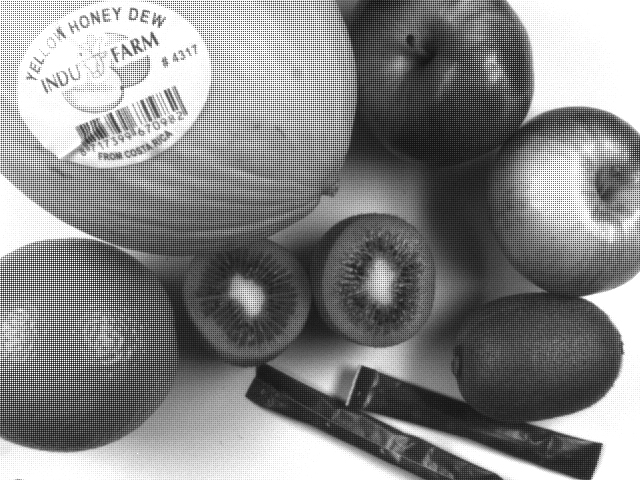
原始拜耳图像
单芯片颜色传感器上的RGB颜色镶嵌可自然地生成灰度图像,其中R / G / B像素的亮度不同。图片被光栅化。对于该图案,可以计算颜色信息。

计算的RGB图像
从Bayer原始图像计算出的彩色图像包含RGB信息,但由于传感器上的物理拜耳图案以及对象边缘的插值不正确而导致细节分辨率下降。
该图像通常也可以作为原始拜耳8位灰度图像而不是数字24位RGB彩色图像进行传输。但是,颜色转换须在抓帧器上或通过PC软件进行。后续转换的优点是可以传输更高的帧速率,因为仅须传输8位单色而不传输24位颜色信息。如果转换已经在相机中完成,则不需要PC的图像采集卡或CPU负载。
 微信在线咨询
微信在线咨询