我们检测系统的完整框架,整机主要由整体框架结构、内部主机、光源控制器、Plc控制系统、伺服电机、旋转载体、相机支架、图像采集装置和显示屏组成。下面,我们来了解一下自动电子光学视觉检测机器有哪些配置?软件功能有哪些?
一、机器配置
1、整体框架结构为内部相关装置提供支撑和保护。
2、内部主机主要进行图像处理软件系统。
3、光源控制器主要控制被检测对象的照明。
4、Plc控制系统控制伺服电机的启动或停止动作和旋转动作,并记录摄像机的动作,如触发和抽吸位置。
5、伺服电机安装在旋转载体下,以可调的速度控制载体的运动。
6、旋转载体是将进给物体从玻璃板上的振动给料机携带到特定位置,准备好成像采集,然后转移到上位软件系统中进行处理,处理效果好或差。
7、摄像机支架用于支持特定位置的摄像机。
8、图像采集装置由摄像机和镜头组成。
9、图像处理软件系统根据特定的软件设置对图像质量进行评价。
10、显示屏幕显示图像处理程序和检测结果的操作界面。
1.1、喂料结构
我们使用振动馈线使物体做好准备,并保持下一个动作的一致性。然后将它们带到旋转玻璃板上,并达到图像处理的特定位置。
1.2旋转式运输机
旋转载体也称为玻璃转盘.当被检测的物体通过振动给料机传送到旋转板时,它们将被不同位置的特定摄像机拍摄下来。然后将采集到的成像数据传输到上位机软件系统中,并对结果进行处理和评价,并将结果转移到下位Plc控制系统,该系统将通过喷嘴进行分选操作,以潜入好的或负的物体。
1.3下行控制系统
图1-3显示了下位控制系统,包括Plc控制器、伺服电机驱动、主机、电源、伺服电机等。

在工作过程中,通过上端控制接口的具体操作,将动作传递给下位控制系统,整个下行控制系统可以调节转台的运动(前向旋转、反向旋转、变速)。同时,摄像机由光电传感器触发。触发信号被发送到plc。根据目标携带到不同摄像机位置所需的时间,确定不同摄像机的触发时间。
以上是对我国光学分拣机结构的简要介绍。
二、软件功能
1、目前,我们的光学分拣机可实现以下检测:
2、圆尺寸测量(内径、外径、天平、厚度);
3、线对线距离(适用于测量规则矩形的长度、高度、宽度、步长和步长);
4、点到点的距离(适用于测量点的大小,点到点的大小);
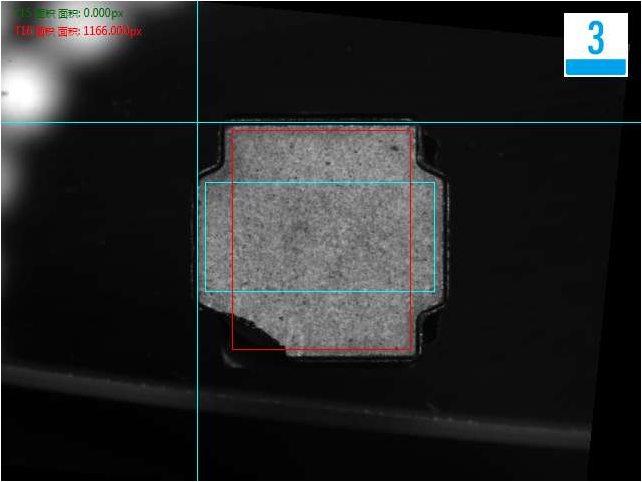
5、面积测量(适合于测量零件的特定面积,判断好坏);
6、螺钉检测(适用于测量外径、斜螺纹、齿数和距离);
7、定位(适用于检测零件的相对位置关系);
8、缺陷检验(适用于表面缺陷、划痕和痕迹);
9、比较功能(根据良好的部件设置模板以匹配检测部件的质量):
10、OCR识别(适合不同字符识别);
11、角度测量(适合于边缘之间的适当角度);
12、模板匹配(适合使用所建立的模板搜索同一部分图像并输出数量和位置);
13、内外边缘检测(区分零件的内外边缘);
14、块定位(定位固定截面和测量尺寸):
15、功能组合(上述功能可以组合,实现多种检测和测量任务)。
以上都是我们光学分拣机的功能。利用上述软件系统可以实现一些功能。包括尺寸测量(圆内外径、圆长/宽、台阶高、台阶宽)、螺杆内外尺寸测量、齿轮/齿轮头/圆螺纹/根测量、毛刺检测、表面灰尘检测、产品完成检测(边缘破碎、零件缺失)、表面划痕检测、字符识别、字符检测等。
通过我们的检测软件系统,结合这些功能,我们的光学分光机可以实现更多的图像处理、检测、测量和识别功能。
 微信在线咨询
微信在线咨询